 GitBucket
GitBucket
Newer
#Mapping(建图)
地图可以分为以下三种
有测度的坐标系地图。
只存储拓扑结构的地图。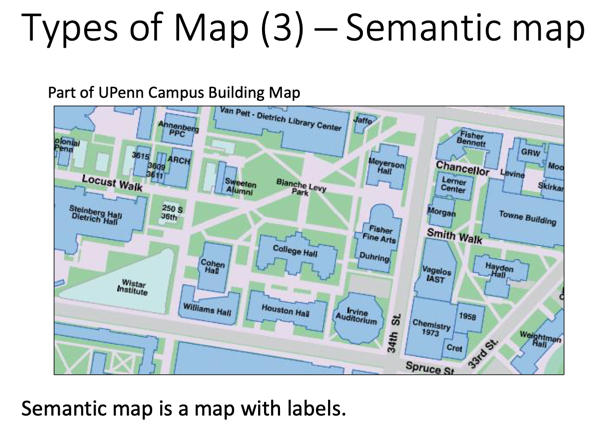
以及带有上层语义信息的地图。(需要人工标注或者上层强大的模式识别算法支持)
在机器人学中,底层最常用的是第一种,metric map。